Reinforcement Learning
Babies have been observed learning to walk without any prior instruction. We frequently ponder just how they manage to do it. They carry it out in a fairly easy manner. They first notice someone else walking around, such as their parents or anyone else who lives nearby. They are aware that each leg must be used separately in order to take a step. They occasionally trip over obstacles while walking, but other times they are able to move smoothly around them. Their parents are overjoyed and show their appreciation for the baby with loud claps or perhaps a chocolate when they can walk over the obstacle. It goes without saying that their parents do not clap or give them chocolates when they trip over while avoiding an obstacle. The infants eventually reach a point where they can learn from their errors and walk more easily.
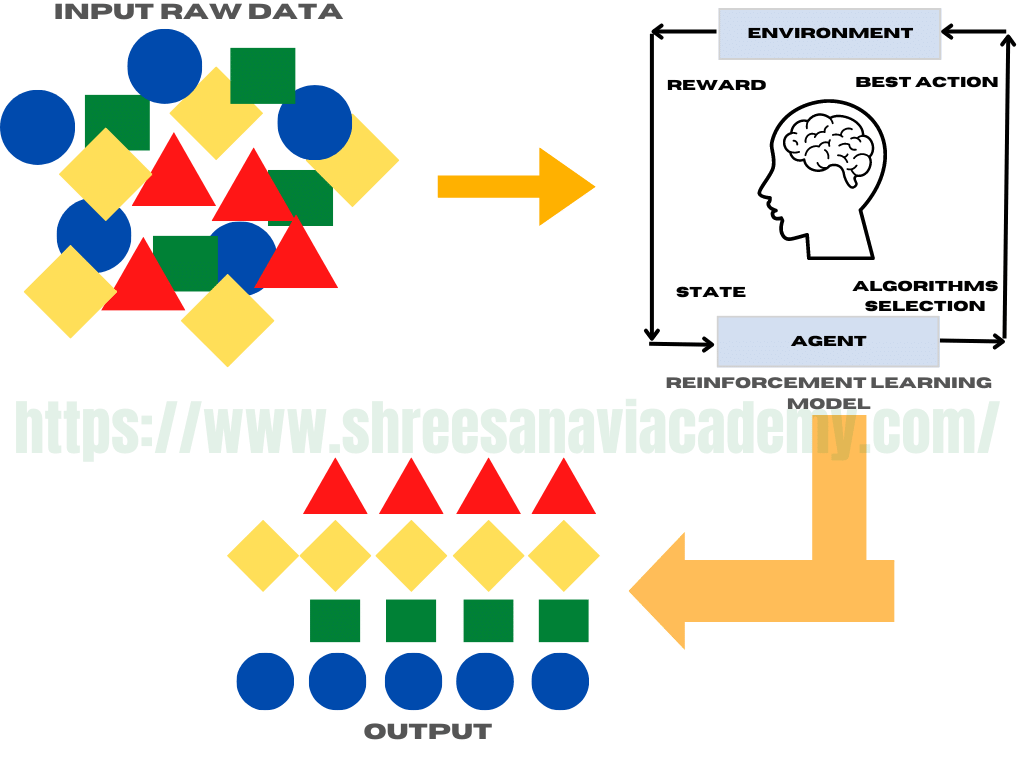
Likewise, machines frequently pick up new skills and develop their own autonomy. Let's try to comprehend in the context of the child learning to walk as an example. The child is the agent and the area with the obstacles on which the child is attempting to walk resembles the environment. The action being attempted is walking. It makes an effort to perform the task better. A reward is given when a sub-task is completed successfully.
Naturally, no reward is given if a sub-task is not completed correctly. This keeps happening until the machine is able to finish the entire task. Reinforcement learning is the name given to this learning process. The high-level reinforcement learning process is illustrated in the following figure.
Self-driving cars are one example of reinforcement learning in modern technology. Speed and speed limits on various road segments, as well as traffic, road, and weather conditions, are among the crucial details that it must consider. Start/stop, accelerate/decelerate, turn left/right, and other operations must be performed. The scope of this book does not include additional information on reinforcement learning.